PHP底层探索(四):SAPI的生命周期
本文共 399 字,大约阅读时间需要 1 分钟。
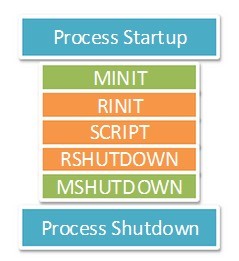
CLI/CGI模式的PHP属于单进程的SAPI模式。这类的请求在处理一次请求后就关闭。也就是只会经过如下几个环节: 开始 - 请求开始 - 请求关闭 - 结束 SAPI接口实现就完成了其生命周期。
 单进程多请求则如下图所示:
单进程多请求则如下图所示: 
多进程的SAPI生命周期
通常PHP是编译为apache的一个模块来处理PHP请求。Apache一般会采用多进程模式, Apache启动后会fork出多个子进程,每个进程的内存空间独立,每个子进程都会经过开始和结束环节, 不过每个进程的开始阶段只在进程fork出来以来后进行,在整个进程的生命周期内可能会处理多个请求。 只有在Apache关闭或者进程被结束之后才会进行关闭阶段,在这两个阶段之间会随着每个请求重复请求开始-请求关闭的环节。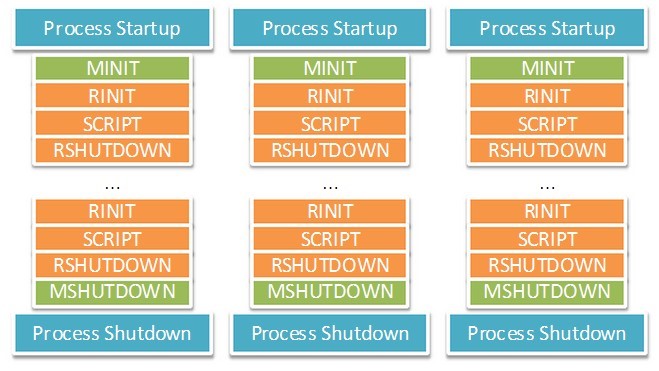 多线程SAPI生命周期 多线程模式和多进程中的某个进程类似,不同的是在整个进程的生命周期内会并行的重复着 请求开始-请求关闭的环节。
多线程SAPI生命周期 多线程模式和多进程中的某个进程类似,不同的是在整个进程的生命周期内会并行的重复着 请求开始-请求关闭的环节。 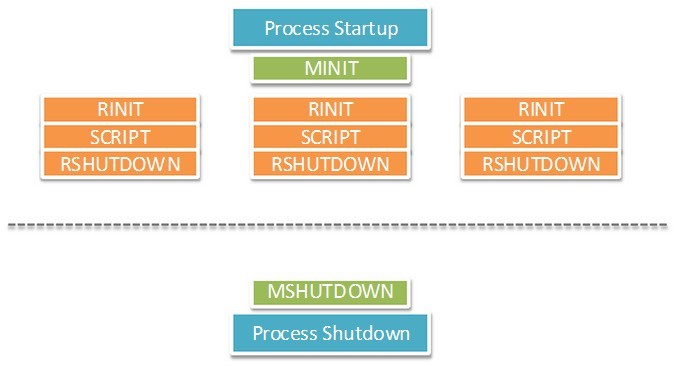
你可能感兴趣的文章
Objective-C 基础入门(一)
查看>>
找工作准备的方向(4月22日写的)
查看>>
关于fwrite写入文件后打开查看是乱码的问题
查看>>
用结构体指针前必须要用malloc,不然会出现段错误
查看>>
Linux系统中的美
查看>>
一些实战项目(linux应用层编程,多线程编程,网络编程)
查看>>
STM32CubeMX 真的不要太好用
查看>>
不要买铝合金机架的无人机,不耐摔,易变形弯曲。
查看>>
ACfly也是基于FreeRTOS的
查看>>
carzepony也在想往FreeRTOS上迁移
查看>>
我发觉,不管是弄ROS OPENCV T265二次开发 SDK开发 caffe PX4 都是用的C++
查看>>
ROS的安装(包含文字和视频教程,我的ROS安装教程以这篇为准)
查看>>
原来我之前一直用的APM固件....现在很多东西明白了。
查看>>
realsense-ros里里程计相关代码
查看>>
似乎写个ROS功能包并不难,你会订阅话题发布话题,加点逻辑处理,就可以写一些基础的ROS功能包了。
查看>>
我觉得在室内弄无人机开发装个防撞机架还是很有必要的,TBUS就做得很好。
查看>>
serial也是见到很多次了,似乎它就是一种串行通信协议
查看>>
TBUS的一些信息
查看>>
专业和业余的区别就在于你在基础在基本功打磨练习花的时间
查看>>
通过mavlink实现自主航线的过程笔记
查看>>